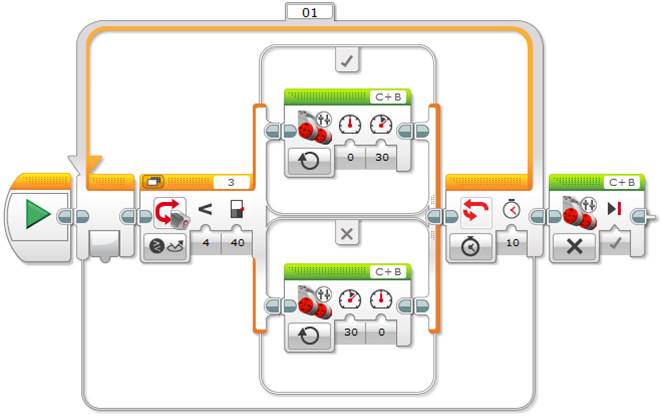
First of all drag in a Loop Block and set it to Time and 10 seconds. May 21 2015 Builderdude35.
Howto Create A Line Following Robot Using Mindstorms Lego Reviews Videos
Why isnt it working 4.
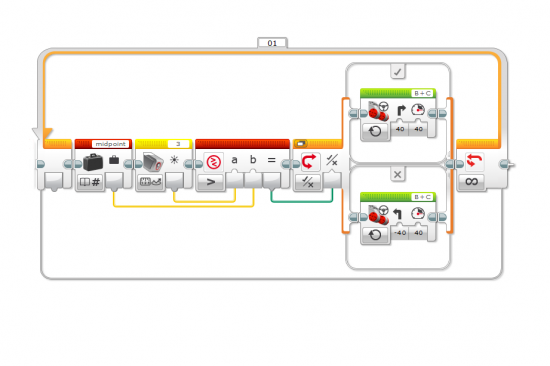
. The second way to program your EV3 to follow a color line is by using this code. You may need to adjust the Threshold Value of the Switch to find a value between the light background and the dark line. Youtube Today Justin From Lego My Lego explains their follow black line program.
Adjust your scaling factor to. In this first part we stop at an algorithm that is the base for following lines and explains the basic idea for the proportion. Build program and calibrate your EV3 robot line follower with this complete PDF guide to build a simple smooth 3-stage and proportional line follower and achieve the best results.
Line Follower Sensor for NXT or EV3 Your program can then decide if you wish to follow line with it or do something Tutorial S LineLeader LabVIEW Engr100. In this EV3 programming tutorial I will be walking you step-by-step on how to make an effective line following program for your EV3 FLL robot using two co. The robot shifts more in this program but the EV3 is accurate and can deal with turns.
Experience the eternal question. Proportional Line Following with EV3 Mindstorms. Did your line follower work the same on straight and curved lines.
Try it out on different lines. Rinse and Repeat steps 2 thru 4 as necessary The asic Programming Workflow Model as outlined by Evelyn Lindberg is the very essence of this tutorial. EV3 Programming Tutorial Follow black Line smoothly.
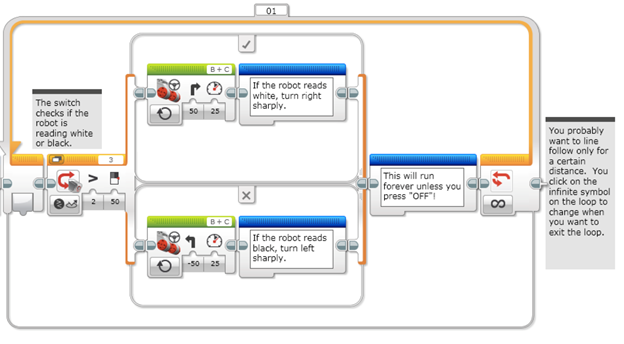
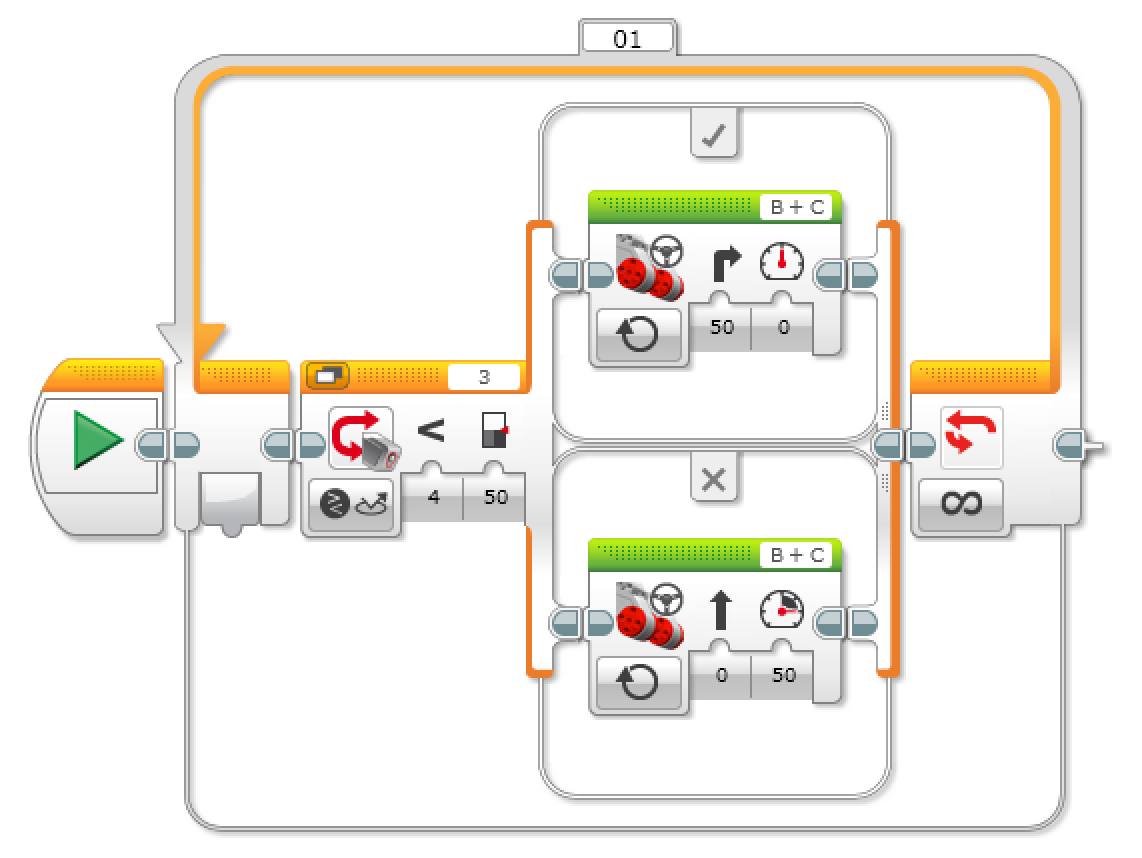
Start motors B and C drive forward with a curve toward the line. Remember to give credit to his work if you use part or all of. If your sensor sees black turn right.
If your sensor sees white turn left. Dont forget to subscribeSOME UNSPOKEN NOTES IN THE VIDEO- The loop interrupt by. Youll need black tape to create a thick black line.
Here it is the EV3 program You can download all the source codes on the bottom of the page Tunning the Kp parameter Start with Kp1 and run your robot. Use Port View on the brick or in the EV3 Software to help with this. Scale the error to determine a correction amount.
If not instead of turn Steering 50 try. Make an Effective Line Following Program in Under 2 Minutes. TestRun the Program 3.
Collect some information about how the Color Sensor works and how the Color and Reflected Light Intensity Modes could be used. Grades 6-8 Lesson plan 1. Compute the error Distance from line Light sensor reading Target Reading 3.
This is especially useful if you are using a line follower for your FLL robot. At the end the program still wont work so check out Part 2 and Part 3 for the final steps. Basic line follow sample code Notes.
LINE FOLLOWER CHALLENGE 1 Step 1. May type all of the code or begin typing and drop down menus will appear to predict desired command IE 4. Wait for the Color Sensor to detect the color white.
Play sound Horn 1. Step 1 In the Logic Toolbox drawer under the Conditionals section drag out an If then else block onto the Workspace and drop it into the forever loop. Write a program that follows the RIGHT edge of a line.
Forever function if true else Step 2. Write the following Program a. Wait for the Color Sensor to detect the color black then start tasks 1 and 2.
Introduction Make your LEGO MINDSTORMS Education EV3 robot follow a line using the Color Sensors Reflected Light Intensity Mode. A must watch if you want to understand the robot at its behaviour. In this EV3 programming tutorial I will be walking you step-by-step on how to make an effective line following program.
Once your robot is up and running youll be challenged to customize the construction and program to invent your own self-balancing robot. Use loops and switches. If the robot cant follow the turns on the line then increase Kp if on the other hand your robot turns violently on the line decrease the Kp value.
Create Program initial instructions connected programming blocks 2. The Switch is set to Colour Sensor Compare Reflected Light Intensity. EV3 Line Following Program.
Connect the EV3 Brick to the PC using the USB cable Select the Download to Robot First time button is. Use the Color Sensor to detect and follow lines. Inside the Loop Block place a.
You can build and program BALANC3R left or Gyro Boy right. They allow your robots line following program to exit the loop and move on to the next part of your program when a certain condition is met. This tutorial will show you how to build and program a self-balancing LEGO MINDSTORMS EV3 robot that can drive around a room.
Prepare Read through the student material in the EV3 Classroom App. Search and Rescue Challenge. Compile the program to make sure there are no errors or bugs in the program 5.
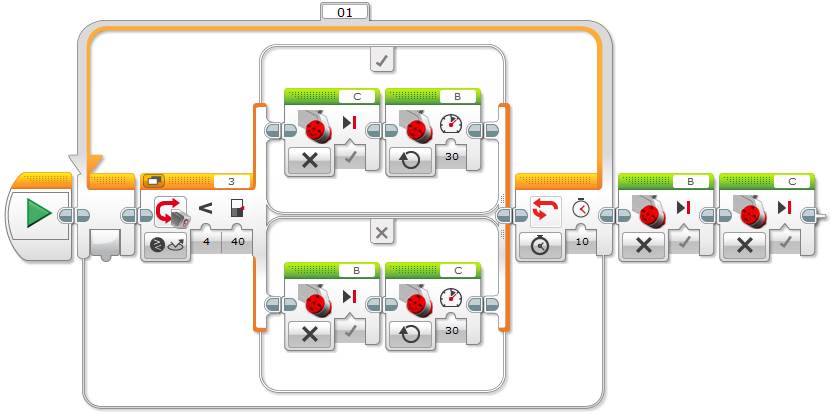
In todays EV3 programming tutorial I will teach you how to use the EV3 color sensor to program loop exits for your EV3 line follower program. Reset the Rotation sensor Only required for line following for a total distance 2. 3 Line Follower for EV3 - The Ultimate Line Follower.
Start motors B and C drive forward with a curve away from the line.
Inside A Two Step Simple Line Follower Lego Engineering
Inside A Two Step Simple Line Follower Lego Engineering

Special Ev3 Line Follower Line Stacking One Light Color Sensor Lego Mindstorms First Lego League Construction Activities
Line Following And Proportional Controls Ev3 Lego Engineering
2
Programming 101 The Line Follower Principle International Robotics Championship

Two Step Simple Line Follower With One Color Sensor With Measure Color Mode Simple Lines Simple Lego Mindstorms

How To Make A Simple Line Following Program In Ev3 Youtube
0 comments
Post a Comment